What is the application of industrial robot loading and unloading?
The industrial robot loading and unloading station consists of loading and unloading robots, CNC machine tools, PLC control cabinets, and conveying lines.

(1) loading and unloading industrial robot
Loading and unloading industrial robots include: industrial robots, control cabinets, teach pendants, and end effectors. The selection of loading and unloading industrial robots generally selects industrial robots and end-effectors according to the layout of the automatic production line processing products and equipment. For example, the workpiece machined by CNC machine tool is cylindrical, the weight is ≤1Kg, and the distance of equipment is ≤1300. Therefore, the machine loading and unloading robot uses the Yaskawa MH6 robot. The robot is shown in the figure. The end effector uses a pneumatic mechanical two-finger single-joint gripper to grip the workpiece, and the solenoid valve that controls the gripper action is mounted on the MH6 robot body.

(2) CNC machine tools
The CNC machine is shown in the figure. The task of a CNC machine is to machine the workpiece, and the loading and unloading of the workpiece is done by an industrial robot.

(3) PLC control system
The PLC control cabinet is used to install circuit breakers, PLCs, switching power supplies, intermediate relays, transformers and other components. PLC is the OMRON company NJ301-1100 controller, the start and stop of the loading and unloading robot, the operation of the conveyor line, etc., are controlled by it.
(4) loading and unloading conveyor line
The function of the loading and unloading conveyor line is to transport the pallet carrying the workpiece to be processed to the loading station. The robot transports the workpiece to the CNC machine for processing, and then transfers the processed workpiece to the pallet, and the finished workpiece is processed by the conveying line. Transfer to the assembly station for assembly. The loading and unloading conveyor line is as shown.

The loading and unloading conveying line is composed of three conveying lines, such as a workpiece loading and unloading conveying line 1, a workpiece loading and unloading conveying line 2, and a workpiece loading and unloading conveying line 3.
a) Workpiece loading and unloading conveyor line 1 The workpiece loading and unloading conveyor line 1 is as shown. It consists of DC geared motor, transmission mechanism, transmission roller, and tray detection photoelectric sensor.

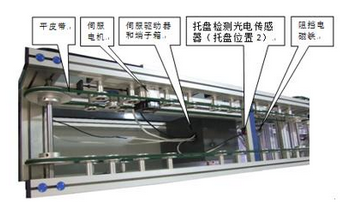
b) Workpiece loading and unloading conveyor line 2 The workpiece loading and unloading conveyor line 2 is as shown. It consists of servo motor, servo drive, transmission mechanism, flat belt, tray detection photoelectric sensor, blocking electromagnet and so on.
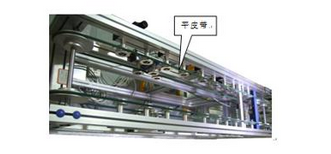
c) Workpiece loading and unloading line 3 The workpiece loading and unloading line 3 is as shown. It consists of a transmission mechanism, a flat belt, etc., and the workpiece feeding conveyor line 3 and the workpiece feeding conveyor line 2 are connected by a pulley and are dragged by the same servo motor.
2. Industrial robot loading and unloading workflow
(1) When the pallet carrying the workpiece to be machined is transported to the loading position, the robot transports the workpiece to the processing table of the CNC machine.
(2) CNC machine tools for processing.
(3) After the machining is completed, the robot transports the workpiece to the pallet at the material position on the conveyor line.
(4) The loading line transports the pallet carrying the machined workpiece to the assembly station.
When the empty tray is placed at the starting position of the conveying line (pallet position 1), the tray detecting photoelectric sensor detects the tray, starts the DC gear motor and the servo motor, and the three conveying lines are simultaneously operated, and the tray is fed to the workpiece loading position "pallet position" 2" delivery.
When the empty tray reaches the loading position (pallet position 2), it is blocked by the blocking electromagnet, and the tray detecting photoelectric sensor detects the tray, and the DC motor and the servo motor stop. Wait for the robot to carry the workpiece to the CNC machine for processing, and then transfer the processed workpiece to the pallet.
After the robot transports the workpiece onto the tray, the electromagnet is energized, the iron is retracted, the servo motor is started, the workpiece loading and unloading line 2 and the workpiece loading and unloading line 3 are operated, and the tray containing the workpiece is transported to the assembly station.
Fresh Potato,Fresh Holland Potato,Yellow Fresh Potato,Yellow Fresh Holland Potato
JINING FORICH FRUITS & VEGETABLES CO., LTD. , http://www.forichgarlic.com